Artificial Intelligence (AI)
エージェンティック・エッジAI:エッジ上で自律的に動作するインテリジェンス
エージェンティック・エッジAIは、高度な利点をもたらす一方で、新たなサイバーセキュリティ上の課題も生じさせます。エージェンティック・エッジAIの仕組みやアーキテクチャを理解し、関連する脅威とそれらに対するリスク軽減策を把握することで、企業や組織の防御力を高める必要があります。


- 本稿では、エージェンティック・エッジAIの概念を取り上げ、そのアーキテクチャやさまざまなデバイスの分類を解説しています。また、それに伴うサイバーセキュリティ上のリスクと対応する防御策についても考察しています。
- 攻撃、侵害、ハイジャック、悪用、その他の脅威など、多様な手口がアーキテクチャの各層に影響を及ぼし、知的財産(IP)の窃取、業務の中断、制御の喪失といった望ましくない結果を引き起こす可能性があります。
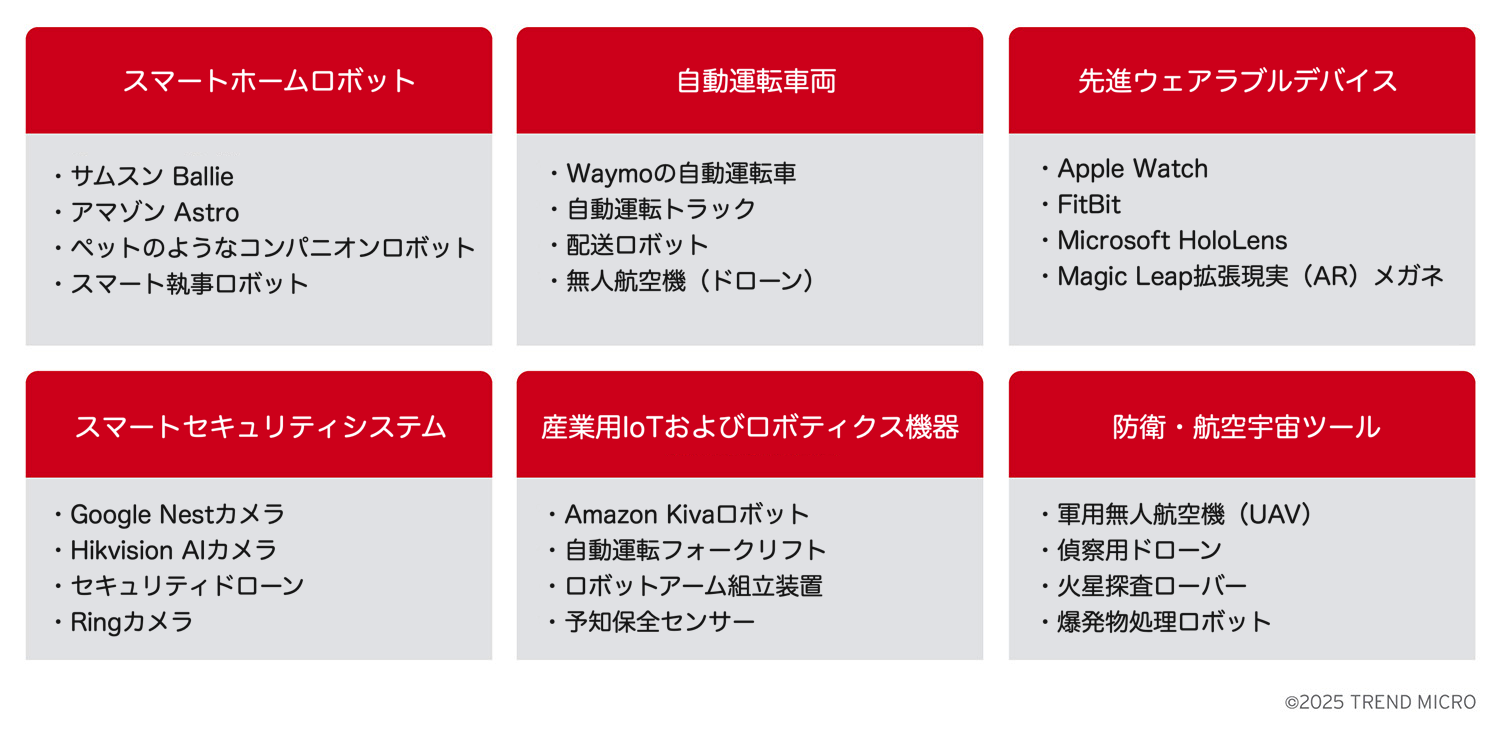
- エージェンティック・エッジAIに分類されるデバイスには、スマートホームロボット、自動運転車、高度なウェアラブル機器、スマートセキュリティシステム、産業用IoT(IIoT)やロボティクス機器、防衛・航空宇宙関連のツールなどが含まれます。
- エージェンティック・エッジAIデバイスを保護するには、多層的なアプローチが求められます。コードの安全性を確保するだけでなく、システムに自律性をもたらす要素、すなわちセンサー、学習パイプライン、AIモデル、ネットワーク、アクチュエーターなどを守ることが重要です。
エージェンティックAI(agentic AI)の注目が高まる中、その一分野である「エージェンティック・エッジAI」に改めて焦点を当てる必要があります。これは具体的にどのようなものか、そのアーキテクチャはどのように説明できるのか、この技術に伴うサイバーセキュリティ上の脅威には何があり、それらのリスクを管理するための対策にはどのようなものがあるのでしょうか。
まず、エージェンティックAIとは何かを見ていきます。大規模言語モデル(LLM)の研究は10年以上にわたり進められており、2018年のBERT、2020年のGPT-3などが代表的な成果として挙げられます。2022年にはOpenAIがChatGPT 3.5を一般公開し、対話型AIチャットボットが広く知られるようになりました。AIはもはや研究室の中の実験的な存在ではなく、一般消費者が活用できる実用的なツールとなりました。この転換点が、急速な技術革新のサイクルを生み出すきっかけとなりました。
2023年、OpenAIはGPT-4 with Visionを発表し、テキストに加えて画像の解析も可能になりました。その数か月後には、主要なAIチャットボットの多くがテキスト、画像、音声、映像といった複数のモダリティを処理できるようになり、マルチモーダル化が進みました。AIは「見る」「聞く」「話す」といった能力を獲得し、さらにAPIを呼び出したりツールを操作したりといった高度な行動も実行できるようになりました。
マルチモーダル処理が一般化するにつれ、次に注目が集まったのが自律的なエージェンシーでした。2024年末には、エージェンティックAIの台頭が見られるようになり、マルチモーダルな入力を理解するだけでなく、計画を立て、判断し、複数のステップから成るタスクを実行できるシステムが登場しました。現在では「エージェンティック」という言葉がAI分野の議論で広く使われていますが、そのすべてが真にエージェンティックであるわけではありません。トレンドマイクロは、この問いに答えるために記事を発表し、真にエージェンティックであるためには、目標志向であり、状況認識ができ、複数のステップを論理的に推論し、行動に基づき、さらに自己改善の能力を備えている必要があると結論づけました。
エージェンティック・エッジAIとは何か
AIハードウェアとエッジコンピューティングの進歩により、低消費電力のCPU(中央処理装置)、GPU(グラフィックス処理装置)、NPU(ニューラル処理装置)、さらには組み込み型センサー群などを備えた、新たな知能デバイス群が登場しました。これらはクラウド接続が不安定、あるいは存在しない環境でも、目標に基づく自律的な動作が可能なデバイスです。AIによって制御されるこれらのデバイスは、認知・推論・行動という中核的な処理ループをローカル環境(すなわち「エッジ」上)で実行し、家庭、工場、車両、ウェアラブル機器など、それぞれの環境で独立したエージェントとして機能できます。
従来のIoT(モノのインターネット)デバイスは、通常データ処理をクラウドに依存していますが、これらの新しいデバイスは遅延が致命的となる意思決定をローカルで処理するため、リアルタイムで応答し、オフラインでも動作を継続できます。したがって、エージェンティック・エッジAIとは、エージェンティックなソフトウェアアーキテクチャとエッジクラスのハードウェアが融合したものであり、クラウドはデバイス上の自律性を補完する役割を担います。
- エージェンティックの側面 – あらゆるエージェンティック・エッジAIデバイスの内部には「オーケストレーター」と呼ばれる推論エンジンが搭載されています。これは省メモリかつ低消費電力で動作するコンパクト/軽量なスモール・ランゲージ・モデルを実行し、ユーザから与えられた高次の目標を受け取り、それを複数のタスクに分解し、各タスクやサブタスクを一つまたは複数の専門的なエージェントに割り当てます。
各エージェントは独立したプログラムであり、多くの場合AIによって制御されています。ビジョンモデル、ウェブクライアント、アクチュエーターなどのツールを呼び出して、環境を感知し、判断し、行動を実行します。
オーケストレーターの監督のもと、これらのエージェントは協調的に動作し、人間の介入を最小限に抑えながら複雑なタスクを解決する適応型ワークフローを形成します。次に「何を」「どのように」行うかを自律的に選択できる点が特徴です。継続的な自己改善(オンデバイス学習)は望ましい要素ですが、システムがエージェンティックであると見なされるための必須条件ではありません。 - エッジの側面 – 認知、意思決定、動作といった時間的制約の大きいタスクはすべて、デバイス内蔵のCPU、GPU、またはNPU上で実行されます。これにより、システムはリアルタイムで反応し、クラウド接続が不安定または切断された状態でも動作を維持できます。
クラウドサービスは、必要に応じて大規模な分析や推論、モデルの大規模学習、複数デバイスの統合管理などに利用されますが、あくまで補助的な加速要素であり、単一障害点にはなりません。
エージェンティック・エッジAIデバイスは商用化が始まったばかりであり、エッジ向けに最適化されたAIチップやコンパクトなモデルの進化とともに、その応用範囲は今後さらに広がると見込まれています。最近の例としては、SamsungのBallieが挙げられます。この家庭用ロボットは今年中に米国市場での発売が予定されています。

出典:Samsung claims its Ballie AI robot will actually be released this year
Ballieはスマートホーム向けに設計された小型の球体ロボットで、家庭内でのコンパニオンとして機能します。カメラ、LiDAR(光検出・測距)、マイク、そして内蔵プロジェクターを搭載しています。
Samsungによると、「BallieはGoogleのGeminiによるマルチモーダル機能と、独自のSamsung言語モデルを組み合わせて活用し、音声や音響、カメラからの映像データ、周囲のセンサー情報など、さまざまな入力を処理・理解します」と述べています。
このエージェンティック・エッジAI構成によって、Ballieは環境を認識し、情報をローカルで処理し、家庭内で自律的に行動できます。たとえば、室内を巡回し、照明や家電を制御し、持ち主の後をついて移動し、壁や床にメッセージや映像を投影することが可能です。
Ballieは環境と能動的に関わる点で「エージェンティック」の要素を体現し、オンボードの計算資源でリアルタイム応答を実現する点で「エッジ」の側面を示しています。
スマートホームロボットの分野で注目されるもう一つの製品として、Roborock Saros Z70があります。これは折りたたみ式の5軸アームを備えたロボット掃除機で、デュアルカメラとセンサーを使ってマッピングや物体認識、繊細な把持を行います。最大50種類の物体を学習し、自律的に障害物を移動させることで、これまで清掃できなかった場所も掃除できるようにします。
その他の代表的な製品には、Hengbot社のSiriusロボティックドッグや、Temi 3パーソナルアシスタントロボットなどがあります。
用途や設計には違いがあるものの、これらのデバイスには共通点があります。データをローカルで処理するため遅延を抑え、クラウド依存を減らし、動的で構造化されていない環境でも自律的に行動し、スマートホームやIoTエコシステムと連携して多様な機能を実行できる点です。
エージェンティック・エッジAIシステムの多層アーキテクチャ
すべてのエージェンティック・エッジAIデバイスは、知能をデバイスとクラウドの間で分散させる多層的なAIアーキテクチャのいずれかの形を採用します。この階層構造によって、リアルタイムで動作するオンデバイス機能と、クラウド支援による高負荷な処理を分離し、自律性と接続性の両立を図ることができます。
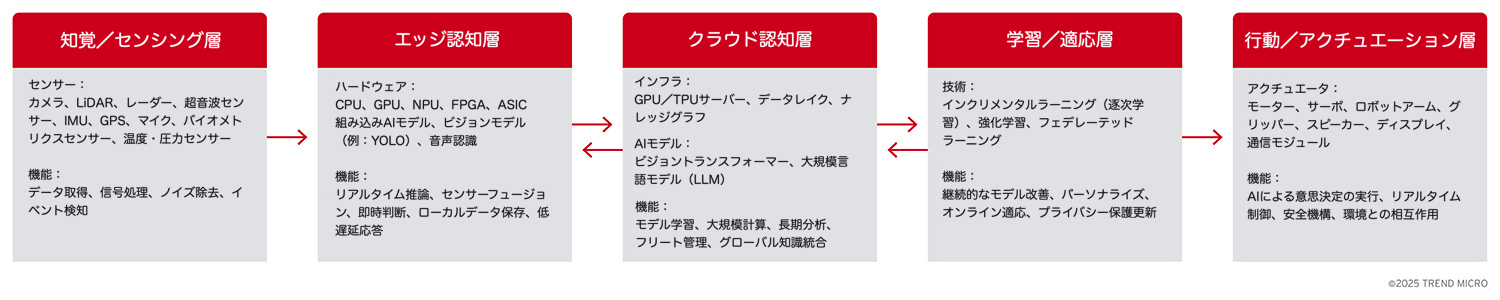
ここでは、多層型エージェンティック・エッジAIアーキテクチャを構成する主要な層について説明します。
- 知覚/センシング層(Perception/Sensing Layer) – 物理的な世界と接続し、生データを収集する層
- エッジ認知層(Edge Cognition Layer) – センサーからのデータを解釈し、即時の意思決定を行うオンデバイスの頭脳
- クラウド認知層(Cloud Cognition Layer) – デバイスの知能を補完するクラウド上の分析・協調処理
- 学習/適応層(Learning/Adaptation Layer) – デバイス上またはOTA(Over-the-Air)アップデートを通じてAIモデルを継続的に改善する仕組み
- 行動/アクチュエーション層(Action/Actuation Layer) – デバイスが環境と相互作用するための物理的またはデジタル出力
知覚/センシング層
知覚層はエージェンティック・エッジAIデバイスの「感覚系」にあたり、周囲の環境を観察し、それを処理可能なデータへと変換する役割を担います。
この層は、カメラ(RGBおよび赤外線IR)、LiDARなどの深度センサー、超音波距離計、レーダー、慣性計測装置(IMU)、GPS、マイク、温度計など、多様なセンサー群を通じて物理世界と接続します。デバイスに搭載されたこれらのセンサーは、常に周囲から生の信号を取得し続けます。
知覚層には、センサーのハードウェアを読み取り、初期的な信号処理を行う低レベルのファームウェアやドライバーも含まれます。これには、アナログからデジタルへの変換、ノイズ除去、センサー値の正規化や較正、シンプルなイベント検出などが含まれます。たとえば、Ballieのような家庭用ロボットでは、カメラとLiDARが人や障害物をリアルタイムで検知する「電子の目」として機能します。
こうした低レベルの処理をセンサーの近くで実行することで、システムは不要なデータを減らし、ノイズを除去してから上位層に情報を送ることができます。
まとめると、この層はエージェンティック・エッジAIデバイスの「目」と「耳」の役割を果たし、画像、音声、深度情報などの観測データを上位層へと送り、解釈の基盤を提供します。
エッジ認知層
エッジ認知層は、センサーデータを即時に処理し、エージェントがどのように応答すべきかを判断するオンデバイスの知能部分です。この層はデバイスの「局所的な脳」ともいえる存在であり、コンピュータビジョン、センサーフュージョン、経路計画などのAIアルゴリズムをリアルタイムで実行します。
解釈と意思決定をデバイス内部で処理することで、エッジ認知層はクラウド接続が途切れた場合でも低遅延の応答と自律性の維持を可能にします。たとえば、Ballieが進行方向に障害物を検知した場合、クラウドの支援を待たずに、エッジ認知層が即座に方向転換や停止を判断します。
このローカル処理は、安全性が求められる意思決定や、わずかな遅延も許されない対話的な動作において不可欠です。エッジ認知層は、AI処理用に設計されたハードウェア、すなわちCPUにGPU、NPU、またはFPGA(Field Programmable Gate Array)などのアクセラレータを組み合わせた構成上で動作します。
この層では、物体検出ネットワーク、音声認識モデル、センサーフュージョンアルゴリズム(カルマンフィルタなど)、制御ポリシーといった多様なAIモデルやロジックが実行されます。限られた計算資源と電力制約の中で動作するため、AIモデルは効率性を高めるよう最適化(量子化や剪定)されています。
エッジ認知層はデバイスのリアルタイム自律性を担い、ミリ秒から数秒単位で反応する必要があります。そのため、厳しい遅延要件を満たすタスクのみがこの層に保持され、より高負荷または緊急性の低い分析処理はクラウド層に委ねられます。
優れた設計のデバイスは、即時かつ安全性の高い意思決定をクラウドに依存しません。たとえば、自動運転車が障害物を検知してブレーキをかけるような場面で、ネットワークの遅延や障害によって対応が遅れることは致命的な結果を招く可能性があります。
まとめると、エッジ認知層はエージェントに独立性と即応性を与え、その場で中核となるAIの判断と行動を実行します。
クラウド認知層
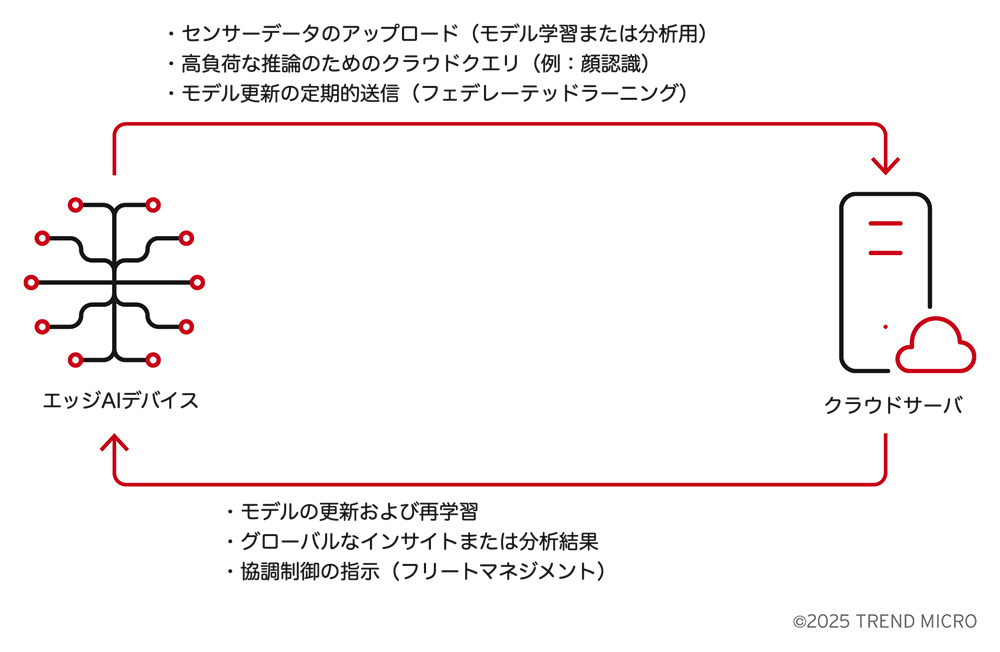
クラウド認知層は、エッジの能力を補完・強化するための外部計算資源と高度な知能を提供します。これは、エッジデバイスが大規模な計算や複雑な処理を必要とする際にアクセスする「クラウド上の大きな脳」に相当します。計算負荷の高いタスク、大規模データの分析、あるいは個々のデバイスの視野を超えた全体的な状況把握を要するタスクは、この層で処理されます。
クラウドは複数のエッジデバイスからデータや知見を集約し、その集合データをもとにディープラーニングモデルを再学習させます。クラウドAIサービスには、エッジデバイスから収集したデータの大規模ストレージ、画像認識や自然言語処理(NLP)などで使用される巨大なトランスフォーマーモデル(エッジでは実行が困難な規模のもの)、そして複数のデバイス群を統括するコーディネーション機能などが含まれます。
クラウド認知の主な機能には、モデルの学習と更新(現場で得られた新しいデータを用いた定期的な再学習)、大規模分析(例:1か月分の監視カメラ映像から異常を検索するなど)、およびエージェント・エッジAIデバイスへのグローバルな文脈提供があります。
たとえば、産業用のエージェンティック・エッジAIシステムでは、各デバイスが定期的にセンサーログをクラウドサービスにアップロードし、工場全体の機械稼働傾向を分析します。クラウド認知は、エージェントの知能をデバイス単体の限界を超えて拡張し、ネットワーク通信による遅延を許容できるタスクの処理に活用されます。時間的制約が厳しい制御ループはエッジ側に残し、クラウドはバックグラウンド処理、知識の統合、全体的な計画策定を担います。
要するに、クラウド層はエージェントにとって外部の知識基盤、あるいは上位レベルの計画センターとして機能します。すべての動作を支配するのではなく補助的な役割を果たし、クラウドからの継続的な入力が途絶えても、エージェンティック・エッジAIデバイスは自立的に運用を続けることができます。
学習/適応層
この層は、エージェンティック・エッジAIデバイスが時間の経過とともに自己改善し、新しい状況に適応できるようにする役割を持ちます。エッジデバイスは学習/適応層を通じてAIモデルを更新し、ユーザや環境に合わせて最適化し、新たな知見を取り入れます。
学習は、計算資源が十分であればデバイス上で行われる場合もあり、またはクラウド上で実施されることもあります。学習の頻度は連続的または定期的であり、学習/適応層によってエッジデバイスは固定的な機能しか持たない装置から、使用するほどに賢く進化するシステムへと変わります。
たとえば、AIを搭載した家庭用ロボットは、住居の間取りや家族の生活リズムを学習し、時間の経過とともに移動効率や予測支援を向上させます。学習層は、モデルの訓練や微調整を行うためのアルゴリズムおよびデータパイプラインで構成されています。デバイスに十分な計算能力がある場合は、オンデバイスで学習を行います。
より一般的な方法としては、学習にクラウドが関与します。デバイスがモデル更新やデータの要約結果をクラウドに送信し、クラウド側で再学習を実施してから、更新されたモデルを全デバイスに配信します。
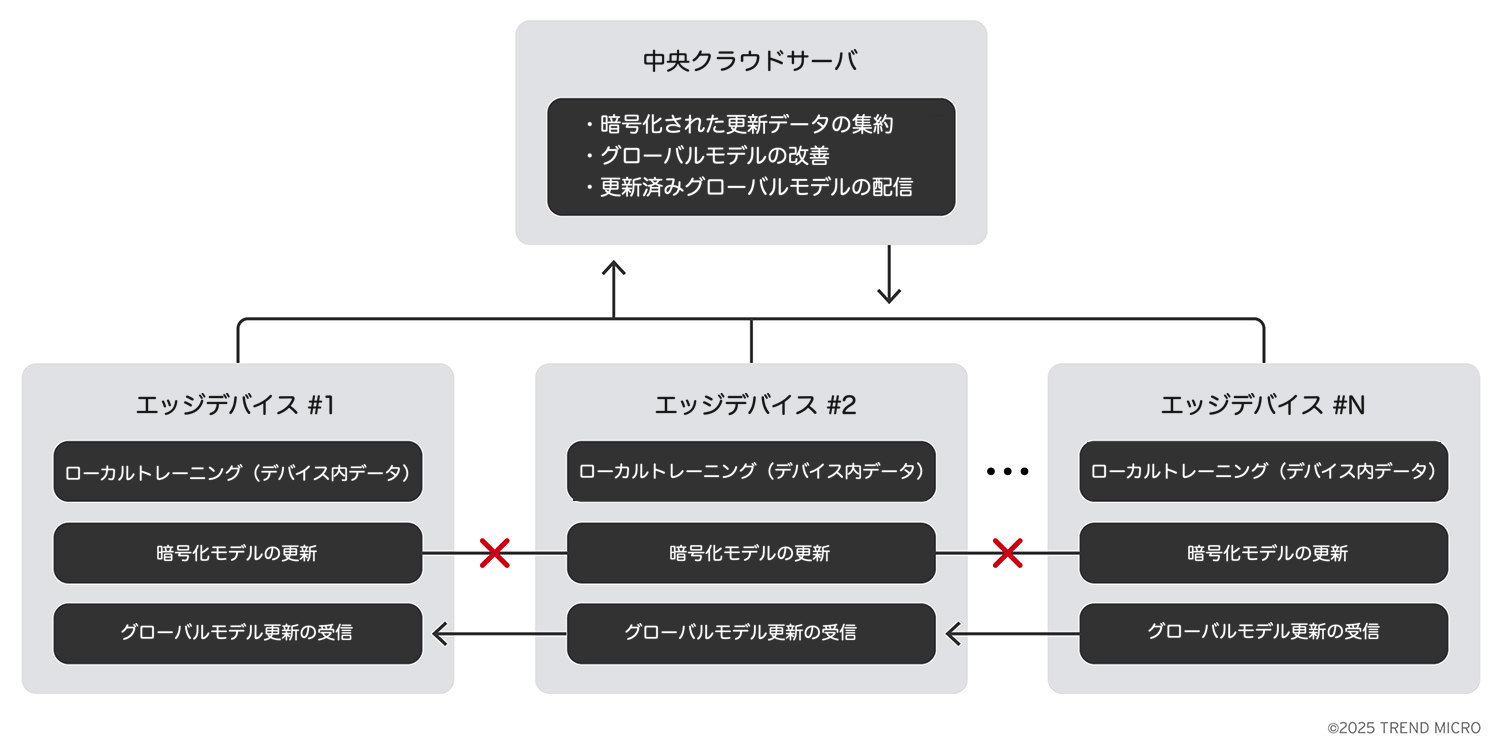
この分野で広く利用されている手法が「フェデレーテッドラーニング(連合学習)」です。各デバイスが自分のデータでローカル学習を行い、生データではなくモデルのパラメータ更新のみを中央サーバに送信し、それらを統合してグローバルモデルを形成します。この仕組みにより、プライバシーを保護しながら全体としてモデルの精度を高めることができます。
この層で用いられるその他の手法には、強化学習(試行錯誤によるフィードバックを通じて方針を改善する方法)や、継続的なクラウドベース学習(新しいデータが追加されるたびに異常検知器や分類器を更新する手法)などがあります。学習/適応層は、エージェンティック・エッジAIデバイスに長期的な自律性と柔軟性をもたらす基盤となります。
行動/アクチュエーション層
この層は、エージェントの意思決定を物理的またはデジタルな世界で実行する役割を担います。知覚と行動を結ぶループの出力側にあたり、センサーがデータを取り込む一方で、アクチュエーターが指令を外部へ送信します。ロボットや自動運転車のような物理的エージェントの場合、この層はモーター、サーボ、車輪、ロボットアームなどの機構を制御し、環境との物理的な相互作用を行います。
ソフトウェアのみで構成されたエージェントの場合、たとえばネットワークトラフィックを管理するエッジAIシステムでは、アクチュエーションはAPIコールや他のシステムへの制御信号を通じて行われます。多くのエージェンティック・エッジAIデバイスでは、この層がリアルタイム制御を担い、AIの判断に即応して安全に動作するハードウェアを動かします。これには、モータードライバや制御回路、サーボ制御ループ、電力制御回路、外部アクチュエーターとの通信インターフェースなどが含まれます。
SamsungのBallieでは、アクチュエーション層にBallieを走行させるモーター、内蔵プロジェクターを制御して映像を投影するメカニズム、スピーカー、家電製品に信号を送る赤外線(IR)ブラスターなどが含まれます。
この層は冗長性と安全性も考慮して設計されています。たとえば、自動運転車では複数の制動回路を持ち、ロボットアームには過剰な速度での動作を防ぐリミッターが備えられます。動作制御サブシステムは、ISO 13849-1(機械制御システムの安全関連部分)、ISO 10218-1/-2(産業用ロボットの安全規格)、および自動車用電気・電子システムの機能安全に関するISO 26262といった安全規格への準拠が求められます。
防衛や法執行などの高リスク領域においては、この層に人間の意思決定ポイントが組み込まれる場合があります。人間の介入を組み込む方式には、次の二つの実装があります。
- Human in the loop(人間がループ内にいる)アーキテクチャは、武器の発射や実力行使のように重大な行動を伴う場合に、人間の明示的な承認を必要とする設計です。標的の選定など一部のプロセスが自律的に行われる場合でも、最終的な実行は人間が承認します。
- Human on the loop(人間がループ上にいる)アーキテクチャでは、システムが自律的に行動できますが、人間のオペレーターが常に状況を把握し、必要に応じて介入や拒否を行う権限を持ちます。
これら二つの人間中心の設計方針は、取り返しのつかない、あるいは人命や倫理に関わる行為において、人間の判断を優先するための法的・倫理的・運用上の選択を組み込むことを目的としています。
アクチュエーション層の性能(速度、精度、信頼性)は、エージェントが現実世界でどれだけ効果的に目標を達成できるかに直接影響します。動作の遅延や不具合が発生すると、認知層の判断が無効化される可能性があります。
この問題を防ぐために、エージェンティックデバイスでは、モーターの動作を制御するPIDコントローラーなどの低レベル制御ループが実装され、高次の指令を滑らかで安定的に実行できるように設計されています。
まとめると、アクチュエーション層はAIが「実際に行動する」ための層であり、環境内を移動したり、物体を操作したり、あるいは前段階の層で得た知見に基づいてデジタルシステムに影響を与えたりすることを可能にします。
多層アーキテクチャをマルコフ連鎖として捉える
これまで紹介したエージェンティック・エッジAIの多層アーキテクチャを、マルコフ連鎖としてモデル化しました。
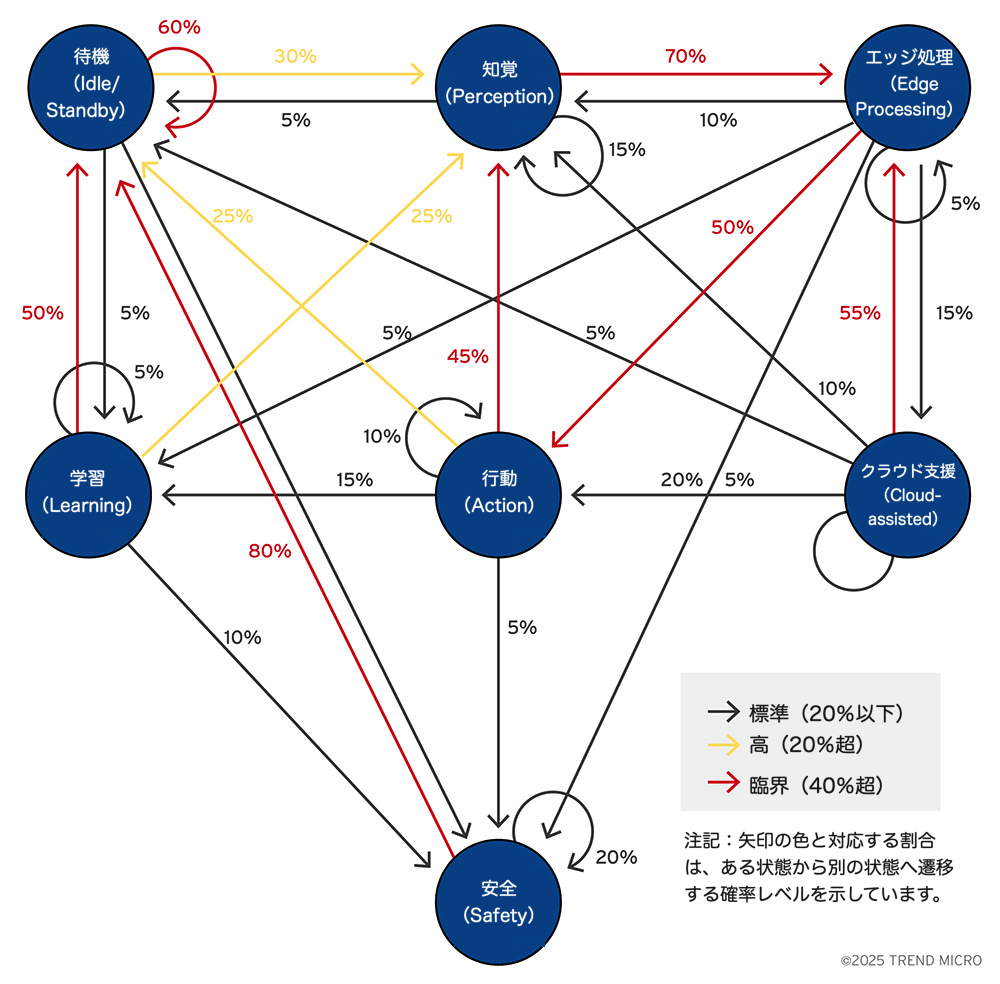
この連鎖モデルでは、デバイスが常に次のいずれか一つの動作状態にあると仮定します。
- 待機(Idle/Standby)
- 知覚(Perception)
- エッジ処理(Edge Processing)
- クラウド支援(Cloud-assisted)
- 行動(Action)
- 学習(Learning)
- 安全(Safety)
「待機(Idle/Standby)」 状態では、デバイスがそのまま留まる確率が高いものの、定期的に「知覚(Perception)」に移行して環境をサンプリングします。
知覚フェーズは多くの場合、迅速なオンデバイス推論を行う「エッジ処理(Edge Processing)」 に引き継がれます。そこからは、ローカルで意思決定と動作を行う「行動(Action)」へ直接移るか、短時間だけ「クラウド支援(Cloud-assisted)」 に処理をオフロードしてから「行動」に戻る、という二つの経路が一般的です。
「行動(Action)」の後、システムは再び観測と再処理のループに入るか、あるいは「待機(Idle/Standby)」に戻ります。
「学習(Learning)」 はバックグラウンドでの適応(微調整やパーソナライズなど)を意味し、一定周期で「待機」 に戻ります。また、「安全(Safety)」 は吸収状態ではない迂回経路であり、障害対応やフェイルセーフ姿勢などを経て、チェック完了後に通常は「待機」に復帰します。
この図は二つの観点から読むことができます。第一に、支配的な経路(dominant path) は高確率で繰り返されるローカルループ(知覚 → エッジ処理 → 行動 → 知覚/待機)であり、エッジ優先・クラウド補助型の設計方針に対応します。第二に、頻度は低いが重要な分岐(rare but important branches) として、エッジ処理 → クラウド支援 の呼び出し、定期的な「学習」、そしてシステムを停止させずにリスクを低減する「安全」経路があります。
各状態の次の行動は現在の状態のみに依存するため、すべてのセンサー読み取りを詳細にモデル化せずとも、クラウド呼び出しと比較したループ内滞在時間、安全機構の介入頻度、バックグラウンド学習が消費するサイクルの割合などを推定できます。
エージェンティック・エッジAIデバイスの分類
エージェンティック・エッジAIは、多様なデバイスタイプと応用分野を包含しています。ここでは、代表的な6つの主要クラスを示し、それぞれの特徴、利用分野、設計について概観します。各クラスは前述の多層アーキテクチャを活用していますが、エッジとクラウドの比重や主目的はそれぞれ異なります。
詳細はこちらをご覧ください。
これら6つのデバイス分類は、家庭向けのコンパニオンから、産業・航空宇宙分野のミッションクリティカルなプラットフォームに至るまで、エージェンティック・エッジAIデバイスの多様性を示しています。各カテゴリーは、要求される遅延、安全性、プライバシー要件に応じてエッジとクラウドの比率が異なりますが、共通する中核的な特徴を持っています。それは、オンデバイスでの知覚、ローカルでの推論、目標志向の自律性、そして時間とともに学習し成長する能力です。
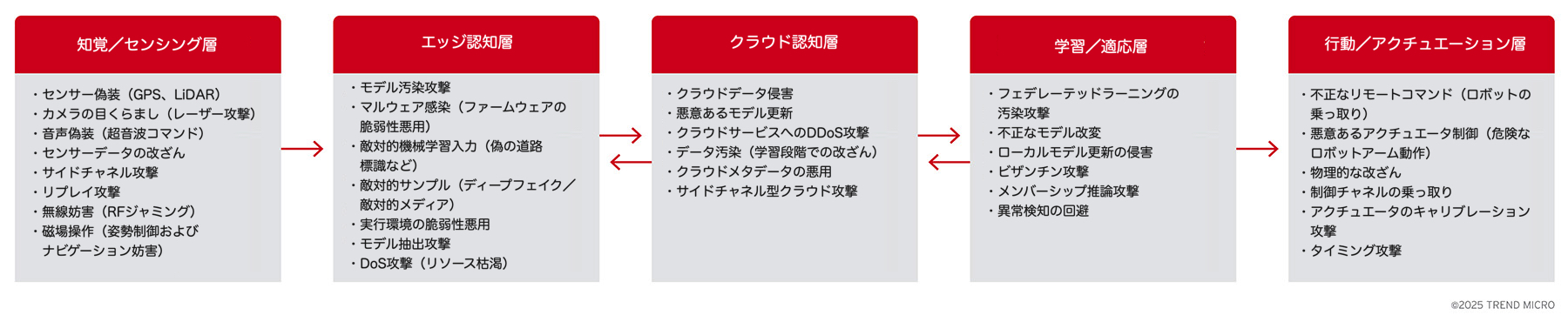
多層アーキテクチャに対するサイバーセキュリティの脅威
自律性の向上は同時に重大なセキュリティ課題を伴います。エージェンティック・エッジAIデバイスは、従来のIoTデバイスに比べて攻撃対象領域が広がっています。これは、複雑なソフトウェア、ハードウェアセンサーやアクチュエーター、そしてネットワーク接続が一体化しているためです。悪意ある攻撃者は、偽のデータを与えてセンサーを混乱させたり、オンデバイスAIを侵害したり、クラウド通信を傍受・改ざんしたり、学習プロセスを汚染したりすることを試みる可能性があります。
こうしたエージェンティック・エッジAIデバイスのセキュリティを確保するためには、アーキテクチャの各層を対象とする包括的な防御アプローチが求められます。
以下の図と表では、各層において想定される潜在的な攻撃を整理し、エージェンティック・エッジAIデバイスが直面し得る拡張された攻撃面の全体像を示します。
詳細はこちらをご覧ください。
- セキュアブートと署名付きファームウェア – すべてのソフトウェアイメージを暗号的に検証し、マルウェアの挿入、ファームウェアのロールバック、不正なモデル置き換えを防止します。
- ハードウェアルートオブトラスト(RoT)およびトラステッドプラットフォームモジュール(TPM) – 鍵を安全に保管し、実行時の整合性を検証することで、攻撃者がブートチェーン、キャリブレーションデータ、モデル重みを改ざんできないようにします。
- エンドツーエンド暗号化(TLS1.3/QUIC)と相互認証 – デバイスとクラウド、デバイスとアプリ、ロボット内部の制御リンクをすべて保護し、盗聴、リプレイ、コマンドインジェクションを防ぎます。
- ゼロトラストネットワーク体制 – デフォルト拒否のファイアウォール、レート制限、強固なAPIキーをすべてのリモートコマンドや更新チャネルに適用し、乗っ取りリスクを最小化します。
- 冗長で相互検証可能なセンサー構成 – カメラ、LiDAR、IMU、レーダーなどを統合し、外れ値を検出することで、スプーフィング、ジャミング、リプレイ、無線や磁場操作を防ぎます。
- 光学および音響の強化 – レーザーフィルター、自動露出制御、マイクの周波数ゲート、超音波ノイズ検出機能を備え、カメラのブラインディング攻撃や隠れた音声コマンド攻撃を防ぎます。
- 敵対的耐性を持つ機械学習の実践 – 敵対的サンプルを用いたモデル学習を行い、入力検証(信頼度閾値、整合性チェックなど)を実施して、偽の標識、ディープフェイク、巧妙な異常入力への耐性を高めます。
- 実行環境のサンドボックス化と最小権限実行 – 知覚モジュールと計画モジュールを分離してコンテナ化し、どちらかが侵害されても、攻撃者がアクチュエーターや機密データにアクセスできないようにします。
- リソース制限とウォッチドッグタイマー – CPU、GPU、NPU、メモリ、I/Oの使用量をプロセスごとに制御し、異常使用が発生した場合には再起動または段階的な縮退動作を行い、DoS攻撃や暴走を防ぎます。
- 暗号化されたモデルおよびデータ保管 – オンデバイスのモデル重み、ログ、テレメトリをAES暗号化とハードウェア支援のシーリングで保護し、モデル抽出やサイドチャネル盗聴を防ぎます。
- コード署名と段階的モデル展開 – 署名検証とバッチ配信を組み合わせ、改ざんや破損したモデル更新を全デバイスに展開する前に検出します。
- 安全で監査可能な更新パイプライン – SBOM(ソフトウェア部品表)、再現可能ビルド、CI(継続的インテグレーション)認証を導入し、検証済みのバイナリや学習成果物のみをデバイスに配信します。
- フェデレーテッドラーニングの防御策 – セキュア集約、更新値のクリッピング、異常スコアリング、ビザンチン耐性のある集約方式を採用し、汚染、メンバーシップ推論、勾配の乗っ取りを防ぎます。
- 異常検知と動作監視 – センサーの統計、モデル出力、アクチュエーターの指令を継続的に監視し、学習済みの基準から外れた挙動を検知した際には停止または警告を発します。
- 手動および自動フェイルセーフ機構 – 物理的な停止ボタン、ハードウェアインターロック、ソフトウェアのキルスイッチを備え、整合性チェックの失敗や通信途絶時には安全状態に移行します。
- 重要な行動に対する人間の監督プロトコル – 防衛やセキュリティ領域など高リスクな意思決定には、人間による承認・介入ポイントを必ず設け、自律的機能が人間の判断を補完する形で運用されるようにします。
- 階層的アクセス制御と多要素認証(MFA) – ローカル保守、クラウド管理、ユーザアプリごとに資格情報を分離し、多要素認証を適用して鍵を定期的に更新し、認証情報の窃取を防ぎます。
- 改ざん防止および封印型筐体 – 未使用のデバッグポートを無効化し、侵入検知センサー、防湿コーティング、特殊ネジなどを使用して、物理的な不正アクセスや基板交換を抑止します。
- 安全制約付きアクチュエーターファームウェア – 動作制限のハードコーディング、キャリブレーションチェックサム検証、二重制御チャンネルにより、上位層が侵害されても速度、方向、トルクが安全範囲を超えないようにします。
- 定期的な侵入テストとレッドチーム演習 – センサースプーフィング、DoS、モデル攻撃などを模擬し、その結果を継続的な堅牢化プロセスに反映します。
- プライバシー重視のデータガバナンス – 必要最小限のテレメトリのみを保存し、可能な範囲で差分プライバシーを適用し、ユーザが制御できるプライバシーモードを尊重して、データ漏洩の影響を最小化します。
これらの多層防御による緩和策を実装することで、あらゆる潜在的な脆弱性を制御可能で監視可能、かつ回復可能な状態へと変換できます。これにより、エージェンティック・エッジAIシステムおよびデバイスの自律性、安全性、信頼性を維持することができます。
参考記事:
Agentic Edge AI: Autonomous Intelligence on the Edge
By Numaan Huq and Roel Reyes (Trend Micro Research)
翻訳:与那城 務(Platform Marketing, Trend Micro™ Research)